
Généralités
Cela fait maintenant près de 15 ans que je m'intéresse aux machines d'usinage à commande numérique et aux solutions logicielles et matérielles pour piloter celles-ci. Cela m'a donné l'occasion de mettre en œuvre sur des machines diverses des solutions logicielles complètes que ce soit sur PC sous Linux ou Windows ( LinuxCNC/EMC2, Mach 2, Mach3, Mach4), que des solutions sur OrangePi (AllWinCNC), aussi bien que des solutions embarquées avec interface légère (GRBL, TinyG2, Marlin, Smoothieware, etc..).
Sur cette durée, c'est assez spectaculaire comme il est devenu de plus en plus aisé de manipuler ces technologies. Les limitations de départ (prix, bugs, vitesse d'interprétation et nombre d'entrées sorties) sont repoussées à chaque itération.
Une bonne partie des solutions fonctionnant sur des cartes autonomes ont été largement inspirées par GRBL. Ce petit logiciel sur Arduino a en effet démontré la possibilité d'interpréter du GCODE (langage de programmation des machines à commande numérique) et de piloter des moteurs avec un petit microprocesseur. Il a servi de base ou inspiré des générations de makers et est à la base du développement de l'impression 3D grand public et de bien des machines low cost. Il a été depuis porté sur de nombreuses plateformes matérielles (autres microprocesseurs que celui de l'Arduino) ou adapté pour répondre à des besoins spécifiques. GRBL a de plus profité de la démocratisation des processeurs 32 bits en étant porté sur de plus puissants processeurs que ceux d'ATMEL/Arduino (STM32, ESP32, Texas, LPC1769, etc...).
Cette fois ci nous allons nous intéresser à la dernière évolution du logiciel de Bart Ding : FluidNC. Le portage de GRBL sur esp32 ayant manifestement atteint ses limites, un tout nouveau projet a été créé, avec une communauté de près d'une trentaine de développeurs pilotée par Mitch Bradley et Bart Ding. Et le moins qu'on puisse dire, c'est qu'avec l'expérience acquise, ils sont allés très vite pour proposer une solution hors du commun.
ESP32 ?
L'ESP32 est un SOC (System on Chip) embarquant 2 processeurs Tensilica Xtensa LX6 fonctionnant jusqu'à 160 Mhz. L'un est dédié aux télécommunications (Wifi), l'autre aux programmes utilisateur, bien que l'on puisse tout à fait utiliser les 2 cœurs dans une application. Avec ses nombreux périphériques, c'est un ordinateur complet dans une seule puce.
Le LX6 est en fait un SIP (Semiconductor Interllectual Property core), c'est à dire le "code source silicium" permettant de fabriquer un processeur. Il est commercialisé sous licence par Cadence. Tout comme l'ESP8266 (son prédécesseur et petit frère monocœur), Il repose sur une architecture Harvard ( https://fr.wikipedia.org/wiki/Architecture_Harvard ).
Les 2 processeurs peuvent chacun accéder à la mémoire et au périphériques sur un bus partagé. La plupart des périphériques ont eux même un accès direct à la mémoire par DMA (Direct memory Access) ce qui en fait une architecture très performante. (pour plus d'infos, voir https://en.wikipedia.org/wiki/ESP32 )
Avec une fréquence de 160Mhz (240 sur certains produits), du Wifi et du Bluetooth 4 LE intégré, cela fait une solution idéale pour motoriser bon nombre de projets DIY et même pro. On est donc très loin de l'Arduino de base 8 bits / 16 Mhz ! Surtout à 5 euros la carte....
FluidNC

FluidNC est le logiciel que nous allons installer sur notre ESP32 pour piloter une CNC ou découpe laser.
Caractéristiques :
FluidNC, reprend les bonnes idées de GRBL/ESP32 et ajoute d'autres fonctionnalités :
- Pas de nécessité de compiler le firmware pour s'adapter à une carte particulière. C'est un fichier de configuration au format YAML qui est lu au démarrage pour le paramétrer. C'était une idée clé de Smoothieware, qui n'a pas été beaucoup utilisée ailleurs et qui se révèle bien pratique pour les makers en herbe. En effet, plus besoin de compiler le firmware pour l'adapter à votre matériel, c'est le même pour tout le monde. C'est du coup également très simple pour le mettre à jour.
- Mise à jour par USB ou OTA (wofi, over the air) du firmware.
- Conception orientée objet, favorisant l'extensibilité. Une fonctionnalité = un objet logiciel.
- Couche d’abstraction matérielle pour les fonctionnalités machines comme les broches, lasers, moteurs, et contrôleurs moteurs pas à pas. Il est doc facile de lier un objet aux ressources matérielles.
- Support des cinématiques cartésiennes, corexy, midtbot, wallplotter permettant de faire des machines aux caractéristiques et géométries les plus diverses.
- Multiples interface de contrôle :
- Interfaces série via usb, la plus classique
- Interface Wifi ou Bluetooth (2 firmwares différents, car l'ESP32 ne peut faire que l'un ou l'autre, mais pas les 2)
- en Wifi: interfaces complémentaires Webui (port 80), websocket (port 81), telnet (port 23), et donc possibilité de contrôler la machine par des solutions suportant le Wifi (Lightburn, bCNC, etc..)
- en bluetooth, profil serial BT, et utilisation par une application mobile (pour le moment Android only...)
- Support d'une carte SD externe pour le stockage des fichiers d'usinage / gravure, accessible par une interface web (WebUI). On peut ainsi lancer des fichier par l'interface web sur des fichiers stockés sur carte SD, la machine devenant autonome dans l'exécutiion, sans ordinateur branché.
- Support d'un système de fichiers interne et indépendant de la carte SD pour stocker les fichiers de configuration, accessible également par WebUI
- Dans la WebUI, pilotage de base de la machine (jog, recherche d'origine machine, déclenchement des broches, lasers et autres, et surtout lancement de l’exécution d'un fichier Gcode stocké sur carte SD. Il est également possible de créer des macros assignables à des boutons personnalisés.
- Documentation très complète sur http://wiki.fluidnc.com/
Broches d'usinages / lasers:
Un grand nombre de types d'outils / broches sont supportés par Fluid NC:
- 0>10V - Pilotage d'une broche avec vitesse proportionnelle à une tension (classique sur le contrôleurs VFD=Variable Frequency Drive).
- PWM - Modulation de largeur d'impulsion, pour pilotage moteur DC
- BESC - Pilotage d'un moteur Brushless de modélisme par contrôleur ESC (Electronic Speed Controler)
- VFD - Pilotage de divers systèmes de commandes de broche VFD (Variable Frequency Drive) dialoguant en RS485 (laisiion série) comme les Huanyang, H100, YL620. Très bien pour piloter les plus grosses broches (jusqu'à 5Kw!)
- DAC - Tension continue de 0>3.3V (8 bits)
- HBridge - Pont en H en PWM. Supporte vitesse variable et 2 sens de rotation (ce qui permet un pilotage simplifié de moteur à courant continu à vitesse variable)
- Relais - Le plus classique. On off, et peut supporter le sens de rotation avec 2 relais (On CW, On CCW). Permet aussi de supporter un solénoide (par exemple pour faire un pen up / down sur un wall plotter)
- Laser - Pilotage en PWM, et active le mode "Laser" de FLuidNC (M3= constant power, M4 = Puissance variable). Le mode M4 supporte notamment la modulation de la puissance du laser durant l'accélération afin de maintenir constant le rapport vitesse / puissance pour ne pas bruler le modèle à basse vitesse pendant une accélération.
Moteurs Pas à Pas:
FluidNC est capable de piloter des moteurs avec une grande variété de possibilités :
- Contrôleurs externes, pilotés par les classiques signaux STEP (pas) et DIR (direction)
- Support d'un "Global Enable" qui permet de couper les moteurs lorsque la machine est en veille.
- Support des Stepstick, très utilisés sur les imprimantes 3D, comme les A4988, DRV8825, TB67S249FTG
- Support des Trinamic contrôlés en mode SPI (TMC2130 et TMC5160)
- Support des Trinamic en mode UART (TMC2209)
- Les Trinamic en mode Step/Dir, peuvent être utilisés en mode "Steptick", à condition de les avoir préparamétrés avant.
- RC Servo (servo moteur type modélisme), en mode PWM
- Dynamixel Servo en mode série.
- Solenoid
- Moteurs unipolaires.
Maquette de test :
La mécanique
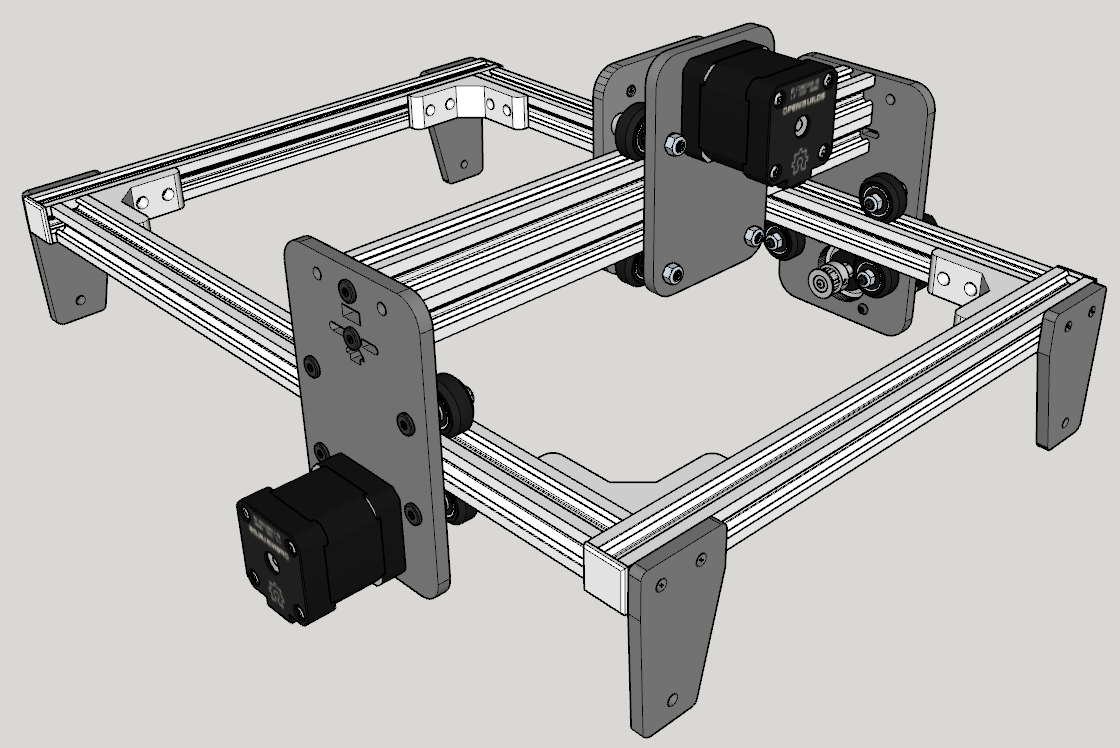
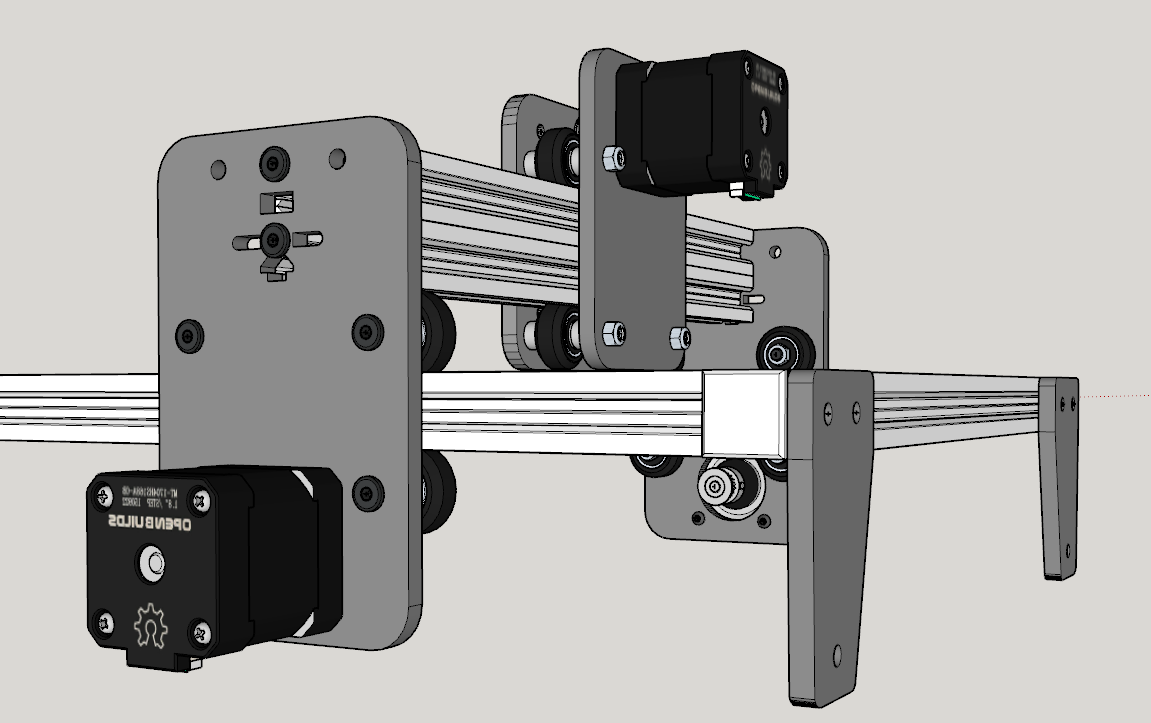
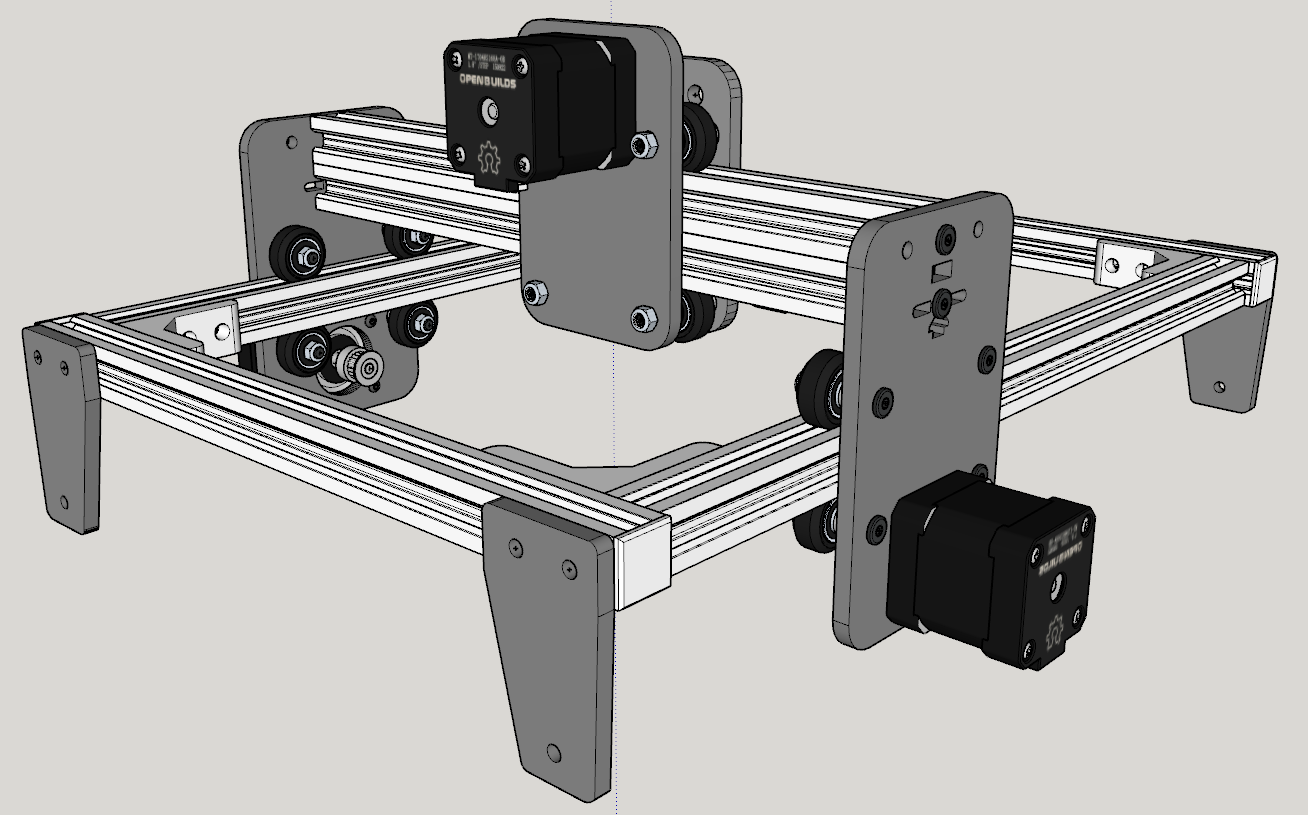
Pour les tests, j'ai réalisé une petite machine à 3 axes. Elle a tout d'abord été dessinée sous Sketchup (fichier ICI: TinyFluid.skp). J'ai finalement mis un axe Z (ex: https://www.aliexpress.com/item/1005004533356691.html ) trouvé d'occasion sur le bon coin pour 15 euros. A ce prix, et avec le moteur, pas la peine de concevoir quoi que ce soit. Des interrupteurs de détection d'origine ont étés ajoutés sur les 3 axes (X0, Y0, Z max) après le dessin initial. Cela donne ceci sans les fins de courses et l'axe Z:
L'électronique
Le Wiki de FuildNC décrit pas mal de solutions matérielles supportant plus ou moins bien FluidNC: http://wiki.fluidnc.com/en/hardware/existing_hardware.
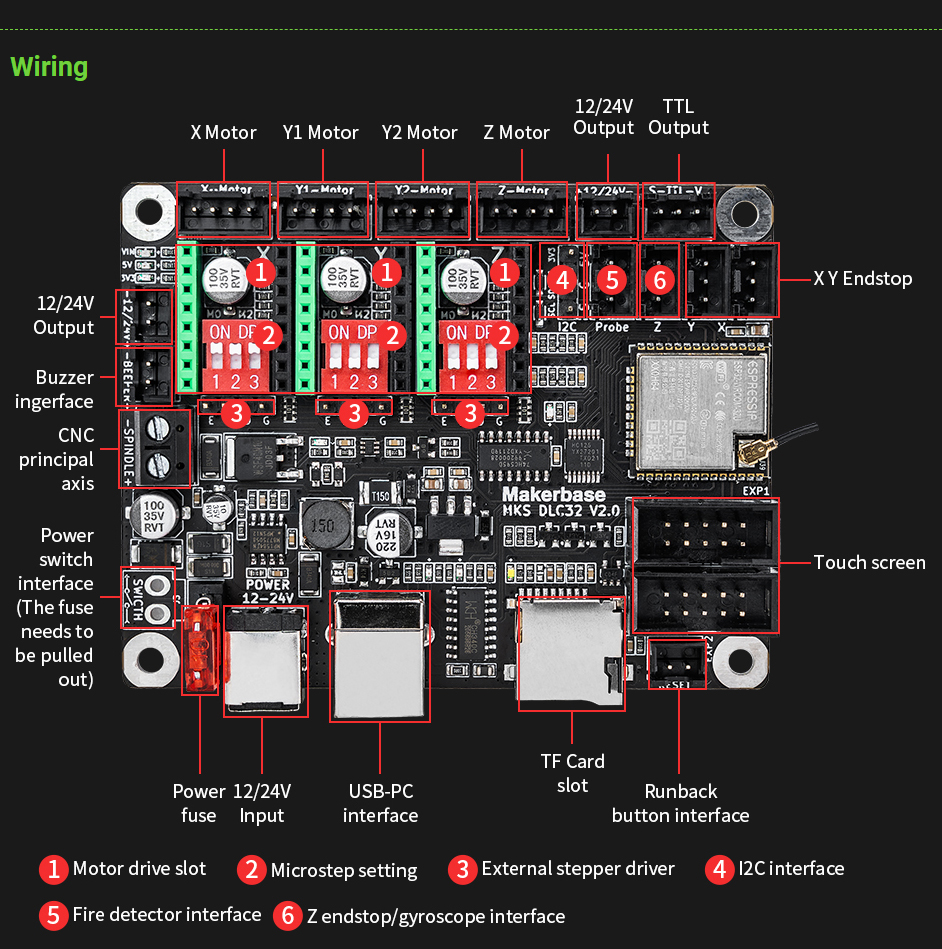
Pour la mise en œuvre du logiciel, j'ai choisi une carte MKS DLC32 V2.1 (15 euros) qui supporte 3 axes dont un double avec des contrôleurs pas à pas Stepstick ou externes, peut piloter une petit broche d'usinage (sur une sortie de puissance commandée par un MOSFET) ou un laser (en PWM). Elle n'est pas open hardware au sens littéral du terme, puisque les schémas sont à peine publiés. Néanmoins la documentation est plus que suffisante pour mettre en œuvre FluidNC sans surprise.
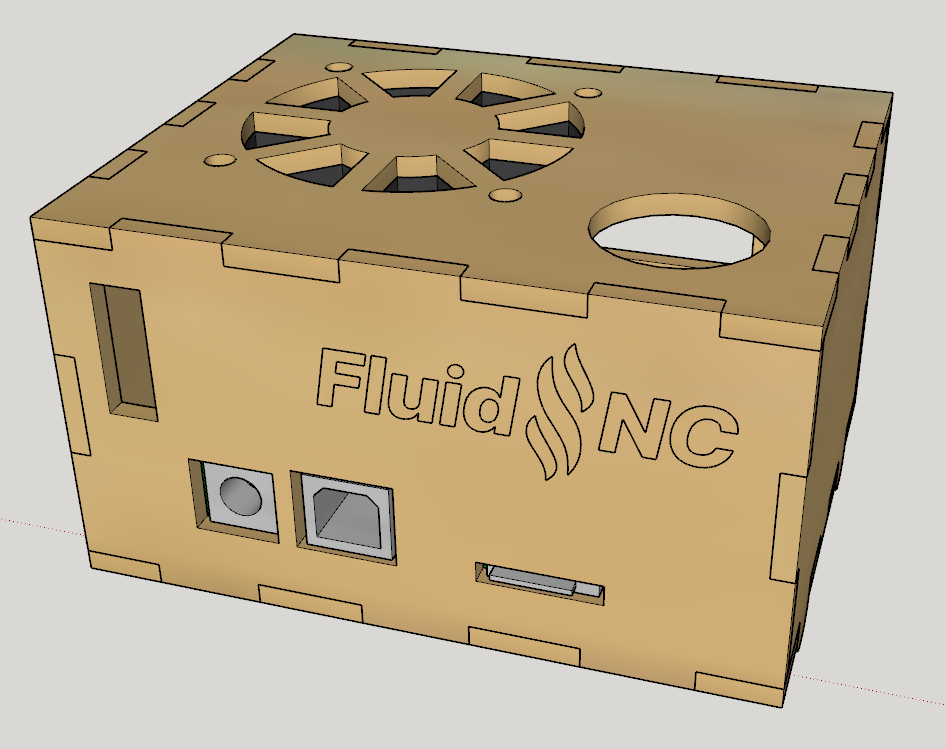
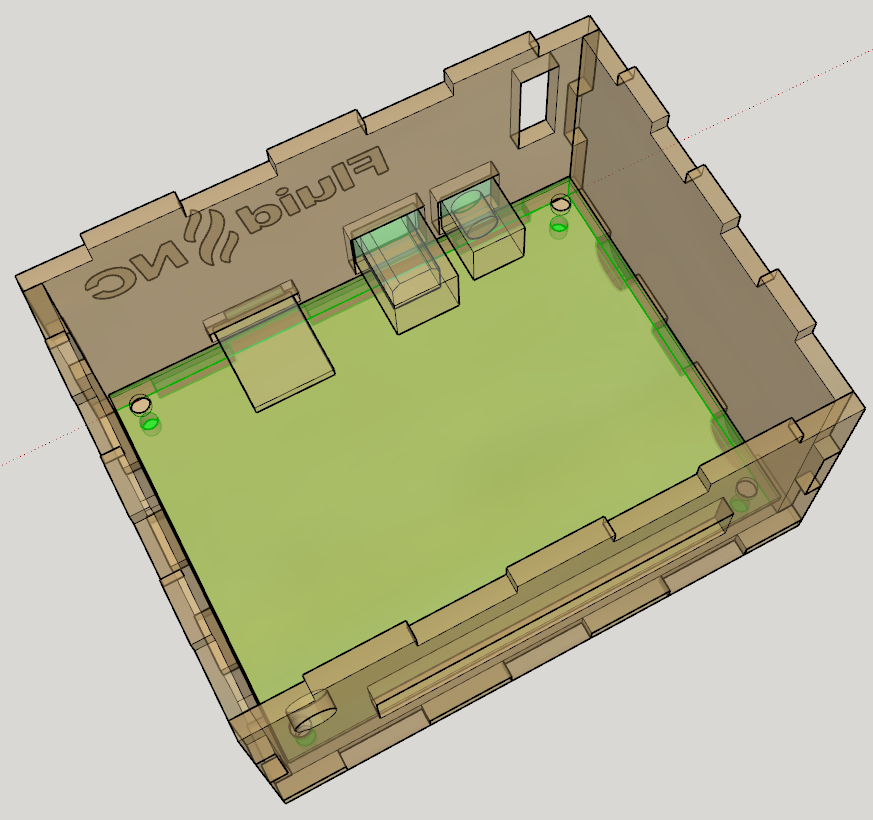
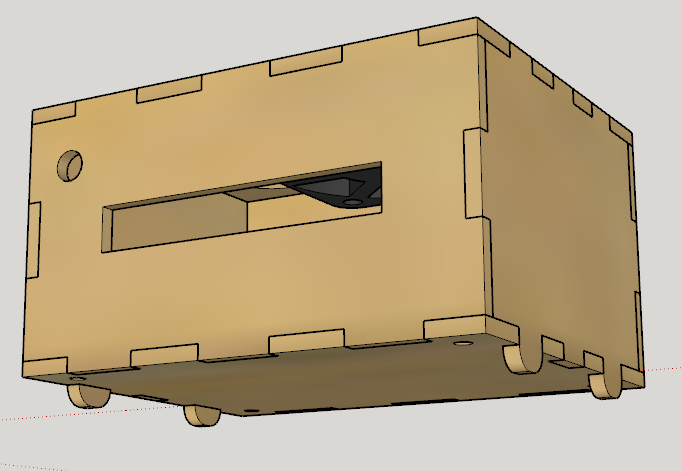
J'ai réalisé une petite boite pour héberger la carte et son câblage, un ventilateur de refroidissement pour les stepsticks (DRV8825), un arrêt d'urgence, un marche arrêt et une antenne wifi externe. Les découpes permettent un accès à la prise d'alimentation, prise USB, carte SD, et les sorties des fils. Elle a été réalisée avec une découpe laser K40 sur du contreplaqué de 3mm. En voici les plans en format Sketchup, DXF et au format Lightburn

Le logiciel: FluidNC
Le wiki de FluicNC est assez clair sur la méthode d'installation: Page d'installation.
Le logiciel est à prendre de https://github.com/bdring/FluidNC . A droite se trouve un bloc "Releases" avec lien direct de téléchargement sur la dernière. Pour une première installation, prendre "fluidnc-vx.y.z-win64.zip". Puis :
- Le décompresser.
- Connecter la carte en USB, et l'alimenter en 12, 19 ou 24V, En effet, le câble USB ne permet pas d'alimenter la partie logique, mais seulement de communiquer. Il nous faut donc brancher les 2...
- Lancer install-wifi.bat (ou install-bt.bat pour une connexion Bluetooth uniquement)
- Si c'est une première installation sur la carte, lancer install-fs.bat, qui va créer la partition spiffs pour stocker les fichiers de configuration. Ne le faire que lors de la première installation, sinon vos fichiers de config seront effacés.
A l'issue, votre carte est installée sous FluidNC mais :
- N'est pas encore connectée à votre réseau WIfi
- N'a pas encore de fichier de configuration pour faire fonctionner votre machine;
- N'a pas encore l'interface HTML "WebUI" fonctionnelle.
Pour le Wifi, cela va être assez simple à paramétrer. A la fin de l'installation, le logiciel lance un terminal qui va nous permettre de communiquer avec la carte afin de paramétrer le wifi grâce à quelques commandes qu'il vous suffira de lancer dans la console. Si vous l'avez fermé, pas de soucis, il suffit de lancer "fluidterm.bat" pour le ré-ouvrir.
Les commandes Wifi sont dans le WIKI: http://wiki.fluidnc.com/en/features/wifi_bt . C'est en lançant quelques unes de ces commandes que nous allons pouvoir paramétrer le wifi (supprimer les commentaires à la fin avant de lancer les commandes... et remplacez les données par les vôtres):
$Hostname=FluidNC ' nom d'hôte de la carte $WiFi/Mode=STA ' Connectée à un réseau domestique $Sta/SSID=SSIDdeMonReseau ' Votre SSID $Sta/Password=MonMotDePasse ' Votre mit de passe wifi $Sta/IPMode=DHCP ' Adresse attribuée automatiquement $HTTP/Enable=1 ' interface web adctivée $HTTP/Port=80 ' sur le port 80 $HTTP/BlockDuringMotion=1 ' n'actualise pas le web durant les déplacements $Telnet/Enable=1 ' telnet activé $Telnet/Port=23 ' sur le port 23
Il est également possible de passe en IP Fixe à l'aide des commande complémentaires suivantes :
$Sta/IPMode=Static $Sta/IP=192.168.0.2 $Sta/Gateway=192.168.0.1 $Sta/Netmask=255.255.255.0
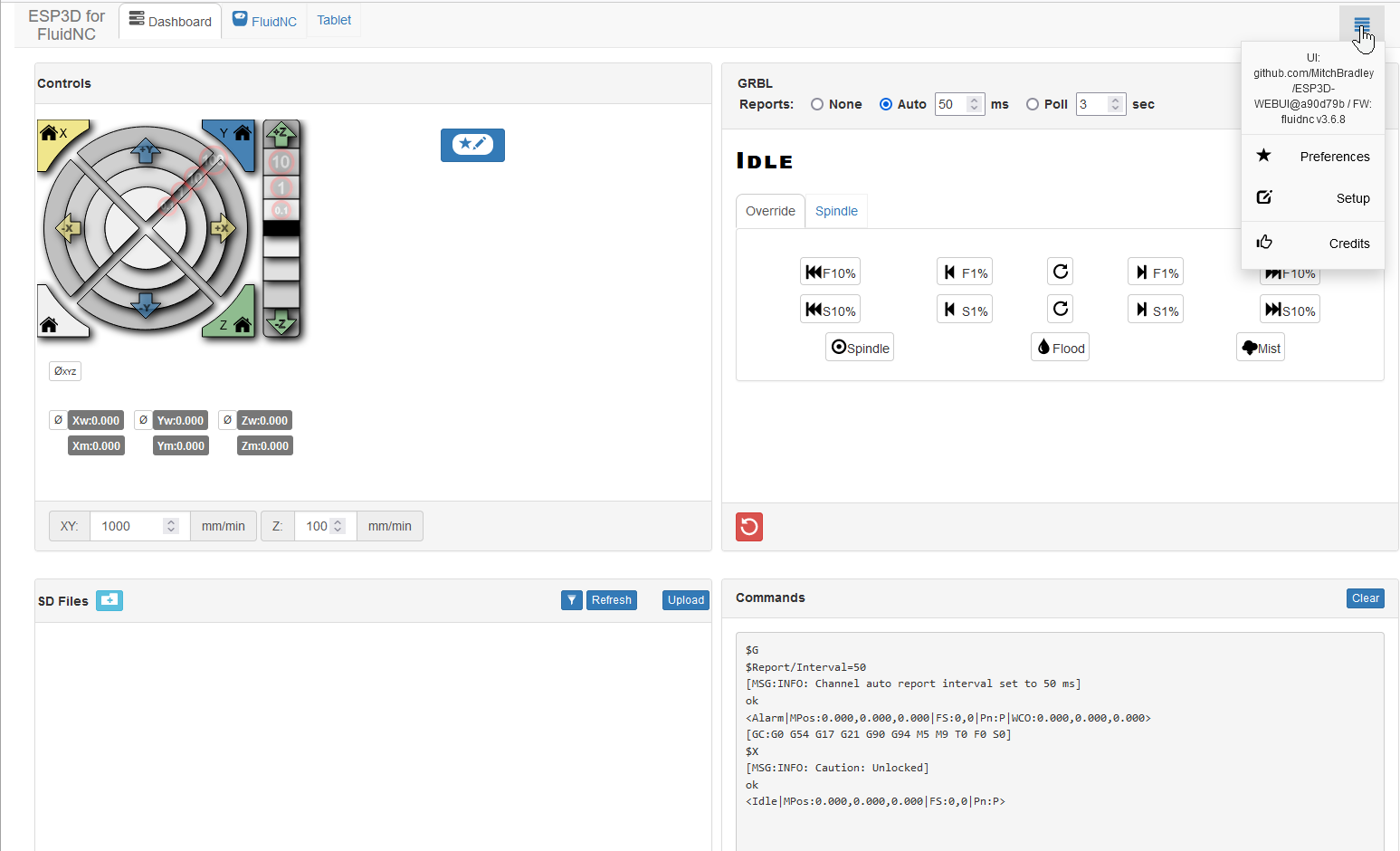
Après redémarrage, la carte est désormais joignable sur votre réseau Wifi. Toutefois, il lui manque encore un fichier pour qu'elle dispose de l'interface web. Celui-ci est livré dans l'archive, dans le sous répertoire "wifi/index.html.gz'. Il suffit de suivre la procédure "Upgrading Firmware" dans le Wiki.
Après avoir redémarré la carte, vous devriez maintenant voir l'interface web en vous connectant sur http://fluidnc.local :
Il est temps de créer le fichier de configuration. L'ESP32 ne disposant pas d'un grand nombre de sorties, une astuce a été mise en oeuvre par MKS sur la carte DLC32, à savoir utiliser le port i2S (normalement réservé à une sortie audio numérique) et mettre un composant qui désérialise les données pour avoir plusieurs sorties en parallèle. Cela permet d'avoir 8 sorties supplémentaires qui seront utilisées pour les moteurs.
Voici l'affectation des entrées sorties de la carte, avec les fonctions des signaux et leurs noms. Ceci a été synthétisé à partir du schéma et de diverses inforamtions, n'état pas directment mis à dispoition par MKS :
| Port /
connecteur |
Nom signal | IO | Commentaire |
| Port I2S | I2S_WS | GPIO.17 | Pour référence uniquement, ne pas utiliser. |
| I2S_BCK | GPIO.16 | Utilisé pour fournir 8 sorties (I2SO.0 à 7). | |
| I2S_DATA | GPIO.21 | ||
| Port SPI | MISO_PIN | GPIO.12 | Pour référence uniquement, ne pas utiliser. |
| MOSI_PIN | GPIO.13 | Port SPI déjà utilisé par la carte SD | |
| SCK_PIN | GPIO.14 | ||
| CS | GPIO.15 | ||
| CARD_DETECT | GPIO.39 | ||
| Moteur X | Enable (shared) | I2SO.0 | 1 sortie drv externe + 1 sortie moteur X1 |
| Step | I2SO.1 | ||
| Dir | I2SO.2 | ||
| Moteur Y | Enable (shared) | I2SO.0 | 1 sortie drv externe + 2 sorties moteur Y1 Y2 |
| Step | I2SO.5 | ||
| Dir | I2SO.6 | ||
| Moteur Z | Enable (shared) | I2SO.0 | 1 sortie drv externe + 1 sortie moteur Z1 |
| Step | I2SO.3 | ||
| Dir | I2SO.4 | ||
| Limites | X- | GPIO.36 | Sur connecteur [J9] |
| Y- | GPIO.35 | Sur connecteur [J10] | |
| Z- | GPIO.34 | Sur connecteur [J11] | |
| Probe | 1 | +5V | Sur connecteur [J12] |
| 2 | GND | ||
| 3 | GPIO.22 | ||
| Spindle | 1 | +12V permanent | Sur connecteur [J7] |
| 2 | GND (cmd par GPIO.32) | , coupure de masse par mosfet | |
| Spindle TTL | 1 | +12V | Sur connecteur [J18] |
| 2 | GND | ||
| 3 | GPIO.32 (TTL) | ||
| Disable F1 Fuse | 1 | In power | Sur
connecteur [J3], enlever le fuse et connecter un M/A |
| 2 | Ext power | ||
| Bus I2C | 1 | 3V3 | Sur connecteur [J2] |
| 2 | GND | ||
| 3 - I2C_SDA | GPIO.0 | ||
| 4 - I2C_SCL | GPIO.4 | ||
| Reset | 1 | GND | Sur connecteur [J5] |
| 2 | RESET | ||
| Beeper | 1 | GND (cmd par I2SO.7) | Sur connecteur [J4] |
| 2 | +12V permanent |
C'est à partir de cette information que nous allons pouvoir batir le fichier texte de configuration "config.yaml" qui va être envoyé à la carte pour lui documenter comment sont utilisées les différente broches :
board: MKS-DLC32 V2.1
name: Hybrid CNC/Laser JPC 335x275x53mm -
meta: (24/09/2022) 09:00
kinematics:
Cartesian:
stepping:
engine: I2S_STATIC
idle_ms: 0
pulse_us: 4
dir_delay_us: 1
disable_delay_us: 0
axes:
shared_stepper_disable_pin: I2SO.0
x:
steps_per_mm: 80
max_rate_mm_per_min: 20000.000
acceleration_mm_per_sec2: 1500.000
max_travel_mm: 335.000
soft_limits: true
homing:
cycle: 2
positive_direction: false
mpos_mm: 0.000
feed_mm_per_min: 200.000
seek_mm_per_min:2000.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: gpio.36:low
hard_limits: false
pulloff_mm: 2.000
stepstick:
step_pin: I2SO.5
direction_pin: I2SO.6
y:
steps_per_mm: 80
max_rate_mm_per_min: 20000.000
acceleration_mm_per_sec2: 1500.000
max_travel_mm: 275.000
soft_limits: true
homing:
cycle: 2
positive_direction: false
mpos_mm: 0.000
feed_mm_per_min: 200.000
seek_mm_per_min: 2000.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: gpio.35:low
hard_limits: false
pulloff_mm: 2.000
stepstick:
step_pin: I2SO.1
direction_pin: I2SO.2
z:
steps_per_mm: 1600.00
max_rate_mm_per_min: 2000.000
acceleration_mm_per_sec2: 100.000
max_travel_mm: 53.000
soft_limits: true
homing:
cycle: 1
positive_direction: true
mpos_mm: 0.000
feed_mm_per_min: 200.000
seek_mm_per_min: 500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: gpio.34:low
hard_limits: false
pulloff_mm: 1.000
stepstick:
step_pin: I2SO.3
direction_pin: I2SO.4
i2so:
bck_pin: gpio.16
data_pin: gpio.21
ws_pin: gpio.17
spi:
miso_pin: gpio.12
mosi_pin: gpio.13
sck_pin: gpio.14
sdcard:
cs_pin: gpio.15
card_detect_pin: NO_PIN
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
# macro0_pin: gpio.33:low:pu
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
macros:
startup_line0:
startup_line1:
macro0: $SD/Run=lasertest.gcode
macro1: $SD/Run=home.gcode
macro2:
macro3:
coolant:
flood_pin: NO_PIN
mist_pin: NO_PIN
delay_ms: 0
probe:
# Sonde raccordée en J12
pin: gpio.22
check_mode_start: true
Laser:
# PWM à 1Khz.
pwm_hz: 1000
# Laser raccordé sur connecteur J18
output_pin: gpio.32
enable_pin: NO_PIN
disable_with_s0: false
s0_with_disable: false
tool_num: 0
speed_map: 0=0.000% 1000=100.000%
pwm:
pwm_hz: 5000
direction_pin: NO_PIN
# Broche 12V (ou 24V) raccordée au connecteur J7.
# Attention à ne pas dépasser la puissance du MOSFET.
output_pin: gpio.32
enable_pin: NO_PIN
disable_with_s0: false
s0_with_disable: true
spinup_ms: 0
spindown_ms: 0
tool_num: 1
speed_map: 0=0.000% 10000=100.000%
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: NO_PIN
digital1_pin: NO_PIN
digital2_pin: NO_PIN
digital3_pin: NO_PIN
start:
must_home: true
Cette implémentation fait appel à plsuieurs astuces :
- L'axe X de la machine étant piloté par 2 moteurs, il sera drivé par la seule sortie ayant 2 connecteurs de sortie moteurs : Y
- De ce fait l'axe X machine est piloté par l'axe Y de la carte (permutation...).
- 2 outils ont été définits, un laser (outil 0) et un moteur de broche (outil 1). Pour en sélectionner, il suffit d'envoyer un GCODE M6 Tx (ex : "M6 T0" pour le laser)
- La puissance de sortie du laser étant senseiblement linéaire lorsque l'on module sa puissance en PWM, speed_map définit une courbe de transfert droite. Il est tout à fait possible de spéciier autre chose.
- Les 2 outils sont racordés sur la même sortie. Il ne pourront donc pas fonctionner en même temps. Mais vous pourriez utiliser une autre sortie de la carte pour le moteur de broche en mettant un relais sstatique externe par exemple pour contourner cela.
- l"outil "Laser" active automatiquement le "Laser Mode" de FluidNC, c'est à dire la capacité à changer la puissance du laser à la volée sans faire d'arrêt. Ceci n'est bien sur pas posisble sur une CNC (et donc sur l'outil broche "PWM").
Je vous encourage à consulter le wiki sur la syntaxe de ce fichier YAML pour bien comprendre ce qui a été fait ci dessus : http://wiki.fluidnc.com/en/config/overview
Ce fichier config.yaml doit ensuite être envoyé à la carte, par l'interface web. La prodécure est documentée également dans le wiki ("Overview" / "Uploading". Des changements minimes à la volée pourront être faits directemnet par l'interface web, afin de tester des paramètres par exemple ("Overview" / "Live changes"). Bien que cela soit possible, je ne vous encorage pas à sauver ces changements dans l'interface car le formatage de votre fichier de config et ses commentaires seront perdus. Dès que vous avez trouvé les bons réglages, reportez les dans votre "config.yaml" et renvoyez le à la carte. Vous pouvez égalemetn mettre plusieurs fichier de configuration sur la carte, et les activer par "$Config/Filename" dans le réglages. Attention toutefois, la mémoire interne est très faible, vous ne pourrez pas stocker beaucoup de fichiers différents dessus.
Branchement d'un afficheur OLED
Les versions récentes de FluidNC permettent le raccordement d'un petit afficheur OLED basé sur un SSD1306 avec 128X64 pixels. Disponibles à 2€ en 0.96 et 4 euros en 1.3 , il vont permettent d'afficher l'adresse IP ainsi que les coordonnées machine en temps réel. Pratique. Le raccordement est aisé puisqu'il suffit de se brancher sur le connecteur J2 et de raccorder les broches de même nom entre elles (SD > SDA, SCL > SCL, DND > GND, 3.3V > VCC).
Quelques lignes ajoutées à la fin du fichier config.yaml vont faire le reste de la magie. Attention à l'adresse de l'afficheur, qui ne sera peut être pas la même pour le votre. Elle est généralement marquée sur la sérigraphie du circuit imprimée. Ici donnée pour un 0.96''.
i2c0: sda_pin: gpio.0 scl_pin: gpio.4 oled: i2c_num: 0 # 3C en hexa = 60 # 78 en hexa = 120 i2c_address: 60 width: 128 height: 64 radio_delay_ms: 1000
Logiciel de pilotage
J'ai testé la découpe laser avec succès sur Lightburn ( https://lightburnsoftware.com/ ). Pour que la compatibilité soit parfaite il suffit de choir GRBL. Cerise sur le gateau, il sera ensuite possble de piloter la machine soit en USB (port sériie sur USB), et même en réseau en donnant l'adresse de la machine ( choisir "Ethernet/TCP" et donner l'adresse IP de la machine).
A noter qu'en WIFI, le débit de transmission de commande vers la machine est beaucoup plus faible. Ce n'est pas un soucis lorsque l'on fait de la découpe, mais peut le devenir lorsque l'on fait de la gravure en mode "raster" d'un image par exemple. En effet, dans ce mode chaque changement de puissance du laser sur un trait continu donnera lieu à l'envoi de commandes... Du coup la machine peut s'arrêter brièvement, laser allumé ce qui est claiement un soucis. Pour faire du gravage sans niveau de gris c'est fonctionnel (ex: sérigraphie de textes sur une face avant d'appareil).
Il est aussi possible dde sauver le fichie GCODE produit par l'outil et de l'envoyer par l'interface web sur la carte SD. La machine devient ainsi autonome, et cela coutourne la limitation du straming de commande via Wifi.
En mode CNC, j'ai travaillé avec un logiciel écrit en Python qui se nomme BCNC: (voir https://github.com/vlachoudis/bCNC) C'est un peu pénible à installer dans les dernières versions mais marche plutot pas mal !
- Installer Python 3.10 dernière version de https://www.python.org/downloads/
- Lancer un interpréteur de commande
- Taper la commadne suivante
pip install --upgrade bCNC
- Le lanceur de bCNC se trouve dans (copier coller le chimin dans la barre d'adresse de l'explorateur windows)
%LocalAppData%\Programs\Python\Python310\Lib\site-packages\bCNC\bCNC.bat
A noter que :
- BCNC permet la connexion part port série (classique) mais aussi par réseau (ex: socket://192.168.xx.yy:23) sur le port telnet.
- BCNC supporte l'auto level avec une sonde qui peut être raccordée à J12, ce qui permet de corriger des défauts de planéité de la machine / table. Voir procédure : https://github.com/vlachoudis/bCNC/wiki/AutoLevel
Voila, j'espère vous avoir donné envie d'essayer, et les clés pour démarrer. Bonne bidouille!


12 réactions
1 De Christophe - 02/08/2023, 22:33
Bonjour Jean-Phi,
Je souhaite faire un upgrade ma machine k40 et je suis tombé sur tes articles. Est-il préférable de partir sur une solution avec carte SKR1.4 comme l'article que tu avais écrit en 2019 (smoothieware + lightburn) ou une solution fluidNC + lightburn avec carte MKS serait réalisable.
Merci pour ta réponse et tes articles
2 De jphi - 03/08/2023, 05:35
"Je souhaite faire un upgrade ma machine k40 et je suis tombé sur tes articles. Est-il préférable de partir sur une solution avec carte SKR1.4 comme l'article que tu avais écrit en 2019 (smoothieware + lightburn) ou une solution fluidNC + lightburn avec carte MKS serait réalisable."
Alors ca c'est une bonne question. SKKR14+ "smoothieware adapté" a l'avantage de fonctionner mieux/plus vite sur de la gravure en mode raster (image, ligne à ligne) car cela utilise une version de Gcode modifée pour passer les changements de puissance à la volée. Sur FuildNC, on sera du une version plus "standard" du gcode, qui sera mieux supportée à long terme. Tu y gagnes aussi un fonctionnement en Wifi (non supporté par Ssur SKR 1.4 par Smoothieware), même si pour du raster, il vaut clairement meiux le faire fonctionner en USB pour éviter les ralentissements.
En fait, en raster / gravure, smootieware adapté n'est vraiment intéresant que si tu as de fréquents changements de puissance sur une même ligne (gravure de photos). Si par contre tu ne fais que du remplissage à vitesse constante (exemplle griser l'intérieur de textes en raster dont tu marques le contour en vectoriel)) les 2 solutions sont équivalentes sur le plan du résultat.
Donc si ton utilisation majoritaire est la découpe ou du raster à puissance constante, FluidNC serait probablement le meilleur choix. Si c'est plutot de la gravure avec beaucoup de changements de puissance (ex: graver des photos) et des grandes zones à graver, tu gagneras en efficacité en raster avec SKR/Smoothie , mais au détriment de l'évolutivité à moyen terme du logiciel qui est un peu bloqué.
Perso, si j'avais à le refaire, et vu mon utilisation (assez peu de raster/gravure, et beaucoup de découpe, je reconsidérerais la question sérieusement pour mettre plutôt FluidNC. La machine laser que j'ai faite avec FluidNC est basée sur un laser LED. et marche super.
Bonne réalisation!
3 De Christophe - 04/08/2023, 00:30
Merci pour cette réponse détaillée et rapide!
Je vais me lancer sur la solution FluidNC dans un premier temps et je verrai
4 De Bob - 12/12/2023, 08:17
bonjour, super intéressant, je suis sur un montage identique avec la même carte mais en laser co2.
J’avais déjà suivi votre montage de bed pour ma k40
Juste une question qui me taraude. Ma laser aura 2 moteurs sur l’axe Y, la carte le permet donc super mais je n’arrive pas à trouver une réponse claire concernant les fins de course en Y. Je vois que si 2 moteurs, il faut 2 fins de course pour éviter un décalage si le courroie saute des pas. Comment relier les 2 sur cette carte, Y et Z ? Et la carte peut elle gérer un décalage en permettant à un des moteurs de continuer pour se recaler sur le fin de course non atteint comme sur les CNC ?
Je patine un peu sur ce point et votre avis me serait utile, merci par avance ...
Bonne journée
RB
5 De esloch - 15/12/2023, 17:26
Je suis en cours de conception d'une CNC Laser / Plotter, et j'envisage d'utiliser une MKS DLC32 pour piloter la machine avec FluidNC. À priori, c'est possible.
Je ne suis pas expert en programmation. J'espère que ce n'est pas compliqué de configurer correctement les pins de la carte.
Aussi, c'est une bonne nouvelle que la possibilité d'utiliser un petit écran sur cette carte avec FluidNC existe. J'espère que je n'aurais pas non plus de problème pour l'installer. Mais c'est quel type d'écran ? Je cherche quelle référence exactement.
Merci.
6 De ProfGra - 25/12/2023, 20:45
Bonjour,
Bravo pour tout ce contenu!!! Et pour la batterie!
J’aurais 12000 questions mais sur d’autres articles, qui n’ont pas de section commentaires. Notamment concernant le MIDI avec les ESP32.
Au passage, le code sur cette page (ah, d’autres aussi en fait) est mal affiché:
https://civade.com/post/2018/12/16/...
J’ai lancé une invitation sur Facebook sinon, au cas où on pourrait communiquer par là.
7 De jphi - 23/02/2024, 10:50
ProfGra, merci pour le retour sur le problème d'affichage du code. Effectivement un MAJ du thème avait induit un petit problème de CSS, désormais corrigé. le code s'affiche bien maintenant.
8 De jphi - 23/02/2024, 10:51
@esloch C'est un écran de type OLED 128x64 que l'on pilote en I2C. J'ai testé et cela fonctionne.
9 De jphi - 23/02/2024, 14:11
@bob, oui, il y a un axe ou on peut mettre 2 moteurs. C'est le Y par défaut, mais rien n'empeche de permuter les configs de X et Y pour mettre 2 moteurs sur le X, puisque la config permet d'associer un axe logique de son choix à n'importe quelle sortie. mais ces 2 moteurs seront banchés sur le même contrôleur. Donc je ne vois pas trop comment gérer 2 switches de home.. Mais si c'est si important, peut être vaut il mieux considérer de mettre une liaison mécanique entre les 2 axes (ex l polie courroies) et de les piloter avec un seul moteur plus puissant?
10 De sym - 09/09/2024, 22:26
bonjour
c'est un plaisir de vous lire sur ce sujet !
j'aurais une petite question a laquelle j'ai du mal a trouver une réponse :
peux t on alimenter cette carte Mks dlc32 en 12v et simultanément connecter l'USB a un PC ? (pour le dialogue) n'y a t il pas conflit avec le 5V de l'USB ?
Merci d'avance pour votre reponse
11 De Pascal - 12/01/2026, 20:54
Bonjour, est-ce qu'il est éventuellement possible de piloter une fraiseuse Windows UPA de chez Micrelec avec un ESP32 en série ? Le fabricant a fermé boutique et le logiciel n'est plus compatible avec Windows 11. Si j'ai bien compris, fluidNC permet de commander une CNC mais ma machine est en port série. Il faudrait donc que je "switch" ce port série et que raccorde l'ESP 32 directement au drivers de moteurs pas à pas ?
12 De jphi - 13/01/2026, 06:47
@sym Le VBus USB arrive sur un fusible réarmable, puis sur une diode en série qui empèche la réinjection du 5V dans l'alimentation USB si un 5V est généré en local par l'alimentation 12V. Donc non, pas de soucis on peut brancher les 2.
@Pascal : Effectivement pas de pilotage série dans FluidNC. Mais si le contrôleur d'origine de votre machine convertie le port série en signaux step/dir pour piloter les moteurs, alors oui. Mais le peu de doc que j'ai trouvé sur cette machine laisse supposer que les commandes moteurs sont réalisées avec le couple L297/298 qui est très peu performant. Il serait probablement souhaitable de
- Ne ne pas connecter les drivers sur la MKS DLC 32
- De refaire complètement l'électronique de votre machine en supprimant carte de commande, cartes de puissance, et en remplaçant cette dernière par de vrais drivers moteurs pas à pas
- les connecter sur le connecteur pour drivers externe (J34/J35/J36) en Step/Dir de la MKS DLC32